电动式电子膨胀阀
电动式电子膨胀阀广泛使用步进电动机驱动阀针,一般可分为直动型和减速型两种。
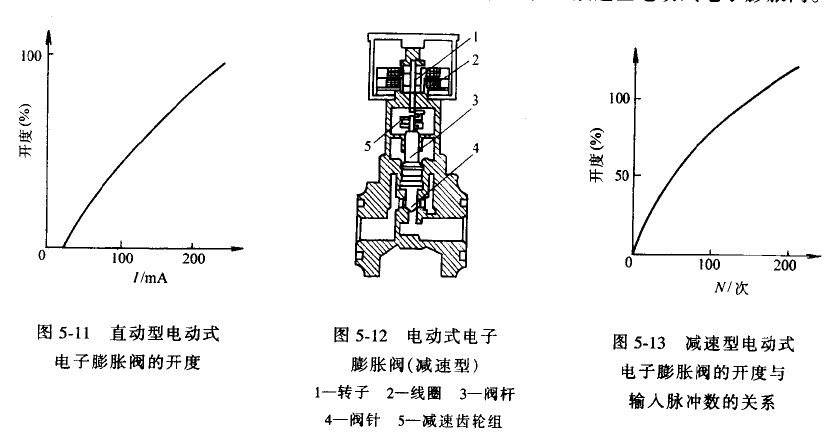
1)直动型其结构如图5-10所示。直动型电动式电子膨胀阀用步进电动机直接驱动阀针。当控制电路产生的步进电压作用到电动机定子上时,永久磁铁制成的电动机转子1转动,通过螺纹的作用,使转子的旋转运动变为阀杆4的上、下运动,从而调节阀针3的开度,进而调节制冷剂的流量。直动型电动式电子膨胀阀的开启特性见图5-11。
在直动型电动式电子膨胀阀中,驱动阀针的力矩直接来自定子线圈的磁力矩。由于电动机尺寸有限,故这个力矩较小。为了获得较大的力矩,开发了减速型电动式电子膨胀阀。
2)减速型 其结构如图5-12所示。减速型电动式电子膨胀周内装有减速齿轮组。步进电动机通过减速齿轮组5将其磁力矩传递给阀针4。减速齿轮组起放大磁力矩的作用,因而配有减速齿轮组的步迸电动机可以方便地与不同规格的阀体配合,满足不同调节范围的需要。减速型电动式电子膨胀阀的开度特性见图5-13。
现以调节蒸发器出口处制冷剂的过热度为例,说明电子膨胀阀的应用。为了获得调节信号,在蒸发器的两相区域段管外和蒸发器出口外管各贴有热敏电阻一片,图5-14中的tlw表示蒸发器出口处管壁温度;t2w表示蒸发器两相区管壁温度;(t6 -t2)表示蒸发器出口处制冷剂的过热度。
由于管壁热阻很小,故热敏电阻感受的温度即该两处制冷剂的温度。两电阻片反映的温度之差,即制冷剂的过热度。这样测定过热度的方法,远比热力膨胀阀测得的过热度准确。实际上,热力膨胀阀是无法检测真实过热度的,它只是通过调节弹簧的预紧力,设定给定蒸发温度时的静态过热度。在启动和负荷突变时,实际蒸发温度偏离给定蒸发温度,从而影响了热力膨胀阀的正确工作。热力膨胀阀的静态过热度设定较小时,甚至会产生蒸发器出口处制冷剂不能完全蒸发的情况,影响系统可靠运转。按图5-14,用两片热敏电阻测得的制冷剂过热度输入控制电路中,按规定的程序转换成脉冲信号后,控制阀针的运动。
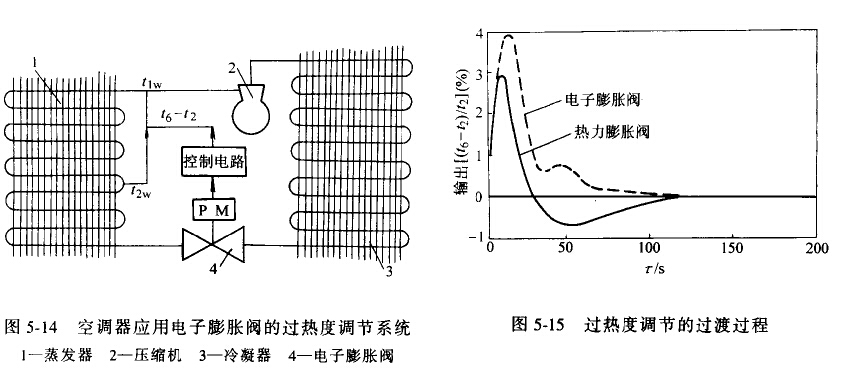
图5-15示出了负荷突然变化时,采用电子膨胀阀和热力膨胀阀对过热度调节的过渡过程。通过两条过渡血线的比较,显示出电子膨胀阀不易产生超调现象。
制冷系统同时使用变频压缩机及电子膨胀阀时,因变频压缩机受主计算机指令的控制,电子膨胀阀的开度也随之受该指令的控制。由于制冷系统的蒸发器和冷凝器已给定,其传热面积是定值,因此阀的开度并不完全与频率成固定的比例。试验表明,在不同频率下存在一个能效比最佳的流量,因此,在膨胀阀开度的控制指令中,应包含压缩机频率和蒸发器温度诸因素。
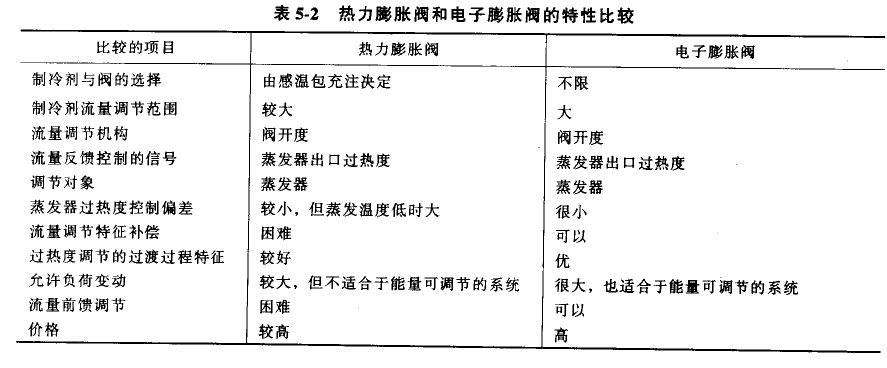
在表5-2中列出了热力膨胀阀及电子膨胀阀的性能和特点比较。